風(fēng)力發(fā)電機組由多個部分組成,而控制系統(tǒng)貫穿到其中各個環(huán)節(jié),相當于風(fēng)電系統(tǒng)的核心。控制的好壞直接關(guān)系到風(fēng)力發(fā)電機的工作狀態(tài)、發(fā)電量的多少以及設(shè)備的安全。因此,發(fā)電效率和發(fā)電質(zhì)量都和風(fēng)電控制系統(tǒng)密切相關(guān)。
其中,主控系統(tǒng)就是風(fēng)電機組的大腦,負責(zé)接收風(fēng)速、風(fēng)向等外部環(huán)境數(shù)據(jù)以及內(nèi)部狀態(tài)監(jiān)測信息,通過預(yù)設(shè)的控制算法計算出最優(yōu)化的操作指令,以實現(xiàn)最大能量捕獲和保護設(shè)備安全。
一、定義
風(fēng)電控制系統(tǒng)是風(fēng)機的重要組成部分,它承擔(dān)著風(fēng)機監(jiān)控、自動調(diào)節(jié)、實現(xiàn)最大風(fēng)能捕獲以及保證良好的電網(wǎng)兼容性等重要任務(wù),它主要由監(jiān)控系統(tǒng)、主控系統(tǒng)、變槳控制系統(tǒng)以及變頻系統(tǒng)(變頻器)幾部分組成。
主控系統(tǒng):主控系統(tǒng)是整個風(fēng)力發(fā)電機組的核心部件,它主要完成機艙數(shù)據(jù)采集、判斷和處理,檢測每個部分傳感器是否有故障,通過各類傳感器對電網(wǎng)、風(fēng)況及風(fēng)機運行參數(shù)進行監(jiān)控,并與變頻系統(tǒng)、變槳系統(tǒng)保持數(shù)據(jù)通訊,根據(jù)各方面的數(shù)據(jù)做出綜合分析,發(fā)出控制指令,實現(xiàn)系統(tǒng)的啟動與停機控制、并網(wǎng)與脫網(wǎng)控制、開槳與收槳控制、偏航與解纜控制、運行數(shù)據(jù)的采集與統(tǒng)計、遠程數(shù)據(jù)傳輸、風(fēng)機遠程控制等。
監(jiān)控系統(tǒng)(SCADA):監(jiān)控系統(tǒng)實現(xiàn)對全風(fēng)場風(fēng)機狀況的監(jiān)視與啟、停操作,它包括大型監(jiān)控軟件及完善的通訊網(wǎng)絡(luò)。
變槳控制系統(tǒng):與主控系統(tǒng)配合,通過對葉片節(jié)距角的控制,實現(xiàn)最大風(fēng)能捕獲以及恒速運行,提高了風(fēng)力發(fā)電機組的運行靈活性。變槳控制系統(tǒng)的葉片驅(qū)動有液壓和電氣兩種方式,電氣驅(qū)動方式中又有采用交流電機和直流電機兩種不同方案。
變頻系統(tǒng)(變頻)器:與主控制系統(tǒng)接口,和發(fā)電機、電網(wǎng)連接,直接承擔(dān)著保證供電品質(zhì)、提高功率因素,滿足電網(wǎng)兼容性標準等重要作用。
二、主控系統(tǒng)的組成
風(fēng)力發(fā)電機組的主控系統(tǒng)通常分為硬件部分(電氣相關(guān))和軟件部分(軟件和算法相關(guān))。
電氣部分(即硬件組成部分)是主控系統(tǒng)的實物載體,與風(fēng)機中的各種外圍設(shè)備如發(fā)電機、齒輪箱、液壓站、變槳系統(tǒng)、變流器等之間形成電氣連接,收集反饋信號,并根據(jù)相應(yīng)的動作邏輯,確保主控系統(tǒng)良好地控制各種外圍設(shè)備,使各設(shè)備能夠相互諧調(diào)配合運行。
軟件部分(軟件和算法相關(guān)):主控系統(tǒng)中發(fā)電流程為主程序,設(shè)備及環(huán)境變量監(jiān)控、故障處理、傳感器通訊數(shù)據(jù)讀取及數(shù)據(jù)存儲為輔助程序。算法包括基本控制策略與優(yōu)化控制策略的研發(fā),程序的仿真調(diào)試、現(xiàn)場實驗與應(yīng)用、數(shù)據(jù)分析評估,從而再次改進控制策略。通過控制算法保證風(fēng)力發(fā)電機組的發(fā)電量最大化的同時有效的抑制風(fēng)機的振動、減小載荷、使風(fēng)力發(fā)電機組平穩(wěn)、有效的運行。
硬件部分:
變槳控制系統(tǒng):與主控系統(tǒng)配合,通過對葉片節(jié)距角的控制,實現(xiàn)最大風(fēng)能捕獲以及恒速運行,提高了風(fēng)力發(fā)電機組的運行靈活性。變槳控制系統(tǒng)的葉片驅(qū)動有液壓和電氣兩種方式,電氣驅(qū)動方式中又有采用交流電機和直流電機兩種不同方案。
變頻系統(tǒng)(變頻)器:與主控制系統(tǒng)接口,和發(fā)電機、電網(wǎng)連接,直接承擔(dān)著保證供電品質(zhì)、提高功率因素,滿足電網(wǎng)兼容性標準等重要作用。
二、主控系統(tǒng)的組成
風(fēng)力發(fā)電機組的主控系統(tǒng)通常分為硬件部分(電氣相關(guān))和軟件部分(軟件和算法相關(guān))。
電氣部分(即硬件組成部分)是主控系統(tǒng)的實物載體,與風(fēng)機中的各種外圍設(shè)備如發(fā)電機、齒輪箱、液壓站、變槳系統(tǒng)、變流器等之間形成電氣連接,收集反饋信號,并根據(jù)相應(yīng)的動作邏輯,確保主控系統(tǒng)良好地控制各種外圍設(shè)備,使各設(shè)備能夠相互諧調(diào)配合運行。
軟件部分(軟件和算法相關(guān)):主控系統(tǒng)中發(fā)電流程為主程序,設(shè)備及環(huán)境變量監(jiān)控、故障處理、傳感器通訊數(shù)據(jù)讀取及數(shù)據(jù)存儲為輔助程序。算法包括基本控制策略與優(yōu)化控制策略的研發(fā),程序的仿真調(diào)試、現(xiàn)場實驗與應(yīng)用、數(shù)據(jù)分析評估,從而再次改進控制策略。通過控制算法保證風(fēng)力發(fā)電機組的發(fā)電量最大化的同時有效的抑制風(fēng)機的振動、減小載荷、使風(fēng)力發(fā)電機組平穩(wěn)、有效的運行。
硬件部分:
控制器:負責(zé)數(shù)據(jù)處理和邏輯運算的核心部件,通常采用高性能的工業(yè)控制計算機或可編程邏輯控制器(PLC)。
風(fēng)速檢測和測量設(shè)備:實時監(jiān)測風(fēng)速、風(fēng)向和氣象條件,為控制算法提供輸入數(shù)據(jù),調(diào)整風(fēng)力渦輪機的工作參數(shù)。
傳感器和監(jiān)測系統(tǒng):監(jiān)測風(fēng)力渦輪機的溫度、振動、電壓等運行狀態(tài),及時檢測潛在問題,支持故障診斷和維護。
執(zhí)行機構(gòu):包括變槳系統(tǒng)、偏航系統(tǒng)、剎車系統(tǒng)等,根據(jù)控制器的指令進行相應(yīng)的動作。
通信接口:實現(xiàn)主控系統(tǒng)與遠程監(jiān)控中心、其他風(fēng)電機組或電網(wǎng)調(diào)度系統(tǒng)的數(shù)據(jù)交換。
風(fēng)速檢測和測量設(shè)備:實時監(jiān)測風(fēng)速、風(fēng)向和氣象條件,為控制算法提供輸入數(shù)據(jù),調(diào)整風(fēng)力渦輪機的工作參數(shù)。
傳感器和監(jiān)測系統(tǒng):監(jiān)測風(fēng)力渦輪機的溫度、振動、電壓等運行狀態(tài),及時檢測潛在問題,支持故障診斷和維護。
執(zhí)行機構(gòu):包括變槳系統(tǒng)、偏航系統(tǒng)、剎車系統(tǒng)等,根據(jù)控制器的指令進行相應(yīng)的動作。
通信接口:實現(xiàn)主控系統(tǒng)與遠程監(jiān)控中心、其他風(fēng)電機組或電網(wǎng)調(diào)度系統(tǒng)的數(shù)據(jù)交換。
軟件部分:
操作系統(tǒng):提供基本的任務(wù)調(diào)度、文件管理、設(shè)備驅(qū)動等功能,確保控制軟件的穩(wěn)定運行。根據(jù)傳感器數(shù)據(jù),通過復(fù)雜的算法計算出最優(yōu)的控制策略,以實現(xiàn)最大功率跟蹤、載荷優(yōu)化等目標。
故障診斷與保護程序:監(jiān)測機組運行狀態(tài),一旦發(fā)現(xiàn)異常,立即啟動保護措施并發(fā)出警報。
通信協(xié)議:定義主控系統(tǒng)與其他設(shè)備之間的通信規(guī)范,確保數(shù)據(jù)的準確傳輸。
控制算法:保證風(fēng)力發(fā)電機組的發(fā)電量最大化的同時有效的抑制風(fēng)機的振動、減小載荷、使風(fēng)力發(fā)電機組平穩(wěn)、有效的運行。工作任務(wù)包括基本控制策略與優(yōu)化控制策略的研發(fā),程序的仿真調(diào)試、現(xiàn)場實驗與應(yīng)用、數(shù)據(jù)分析評估,從而再次改進控制策略。
故障診斷與保護程序:監(jiān)測機組運行狀態(tài),一旦發(fā)現(xiàn)異常,立即啟動保護措施并發(fā)出警報。
通信協(xié)議:定義主控系統(tǒng)與其他設(shè)備之間的通信規(guī)范,確保數(shù)據(jù)的準確傳輸。
控制算法:保證風(fēng)力發(fā)電機組的發(fā)電量最大化的同時有效的抑制風(fēng)機的振動、減小載荷、使風(fēng)力發(fā)電機組平穩(wěn)、有效的運行。工作任務(wù)包括基本控制策略與優(yōu)化控制策略的研發(fā),程序的仿真調(diào)試、現(xiàn)場實驗與應(yīng)用、數(shù)據(jù)分析評估,從而再次改進控制策略。
三、主控系統(tǒng)的分類和功能
風(fēng)電主控系統(tǒng)按照不同的分類標準,可以分為多種類型:
按照控制策略,可以分為最大功率跟蹤控制、變槳控制、偏航控制等;
按照應(yīng)用場景,可以分為陸上風(fēng)電主控系統(tǒng)、海上風(fēng)電主控系統(tǒng)等;
按照系統(tǒng)結(jié)構(gòu),可以分為集中式控制系統(tǒng)、分布式控制系統(tǒng)等。
按照應(yīng)用場景,可以分為陸上風(fēng)電主控系統(tǒng)、海上風(fēng)電主控系統(tǒng)等;
按照系統(tǒng)結(jié)構(gòu),可以分為集中式控制系統(tǒng)、分布式控制系統(tǒng)等。

風(fēng)電機組主控系統(tǒng)的功能:
狀態(tài)監(jiān)測:實時監(jiān)測風(fēng)電機組的各項參數(shù),如風(fēng)速、發(fā)電功率、轉(zhuǎn)速、溫度等,確保設(shè)備在正常范圍內(nèi)運行。
自動控制:根據(jù)風(fēng)速和其他環(huán)境條件,自動調(diào)整風(fēng)電機組的葉片角度(變槳控制)和發(fā)電機的輸出,以最大化能量捕獲和發(fā)電效率。
故障診斷:通過數(shù)據(jù)分析和監(jiān)測,及時發(fā)現(xiàn)設(shè)備故障或異常,并采取相應(yīng)措施,如報警或停機保護。
數(shù)據(jù)記錄與分析:記錄運行數(shù)據(jù),進行歷史數(shù)據(jù)分析,以評估機組性能和優(yōu)化維護策略。
通信接口:與其他系統(tǒng)(如SCADA系統(tǒng))進行數(shù)據(jù)交換,實現(xiàn)遠程監(jiān)控和控制。
安全保護:確保風(fēng)電機組在極端天氣或其他危險情況下的安全運行,如過載保護、過溫保護等。
自動控制:根據(jù)風(fēng)速和其他環(huán)境條件,自動調(diào)整風(fēng)電機組的葉片角度(變槳控制)和發(fā)電機的輸出,以最大化能量捕獲和發(fā)電效率。
故障診斷:通過數(shù)據(jù)分析和監(jiān)測,及時發(fā)現(xiàn)設(shè)備故障或異常,并采取相應(yīng)措施,如報警或停機保護。
數(shù)據(jù)記錄與分析:記錄運行數(shù)據(jù),進行歷史數(shù)據(jù)分析,以評估機組性能和優(yōu)化維護策略。
通信接口:與其他系統(tǒng)(如SCADA系統(tǒng))進行數(shù)據(jù)交換,實現(xiàn)遠程監(jiān)控和控制。
安全保護:確保風(fēng)電機組在極端天氣或其他危險情況下的安全運行,如過載保護、過溫保護等。
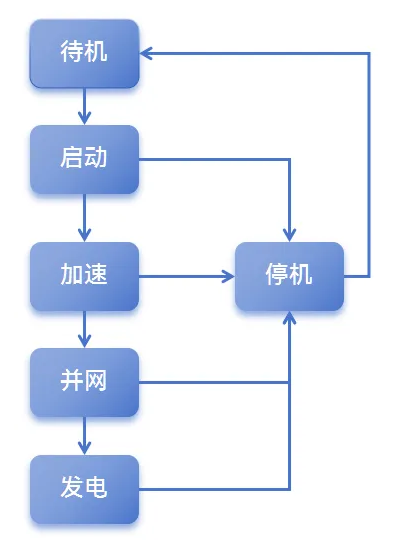
四、主控系統(tǒng)的工作狀態(tài)
1.待機狀態(tài)
當風(fēng)速低于切入風(fēng)速時,機組無法發(fā)電,主控系統(tǒng)將機組置于待機狀態(tài)。在此狀態(tài),風(fēng)電機組處于監(jiān)測和準備狀態(tài)。風(fēng)速、風(fēng)向傳感器持續(xù)監(jiān)測環(huán)境中的風(fēng)速、風(fēng)向變化。
當風(fēng)速達到預(yù)設(shè)的最小啟動風(fēng)速(通常在3米/秒左右)時,主控系統(tǒng)確認滿足啟動條件后進入啟動狀態(tài)。
2.啟動
主控系統(tǒng)根據(jù)機組對風(fēng)情況,發(fā)送指令給偏航系統(tǒng),保證風(fēng)電機組對風(fēng)準確。主控系統(tǒng)發(fā)送指令給變槳系統(tǒng)開始調(diào)整槳葉角度,按固定變槳速率開槳到初始角度(通常是20到40度左右)。
開槳后風(fēng)電機組轉(zhuǎn)速會逐漸加快,主控系統(tǒng)實時監(jiān)測發(fā)電機轉(zhuǎn)速,當發(fā)電機轉(zhuǎn)速超過設(shè)定值(比如300rpm)后,進入加速狀態(tài)。
3.加速
進入加速階段后,變槳系統(tǒng)不再按照固定速率開槳,主控系統(tǒng)按照給定轉(zhuǎn)速采用PID控制策略自動調(diào)節(jié)槳葉角度,其中給定轉(zhuǎn)速將從當前轉(zhuǎn)速逐漸增加到風(fēng)電機組的并網(wǎng)轉(zhuǎn)速。
在加速過程中,主控系統(tǒng)通過調(diào)節(jié)葉片角度和其他參數(shù)來保持轉(zhuǎn)速穩(wěn)定上升,確保機械轉(zhuǎn)速部件平穩(wěn)。
當發(fā)電機轉(zhuǎn)速達到并網(wǎng)轉(zhuǎn)速后,進入并網(wǎng)狀態(tài)。
4.并網(wǎng)
當風(fēng)電機組的轉(zhuǎn)速穩(wěn)定在并網(wǎng)轉(zhuǎn)速附近后,主控系統(tǒng)發(fā)送并網(wǎng)指令給變流器。變流器執(zhí)行并網(wǎng)操作后,進入發(fā)電狀態(tài)。
5.發(fā)電
并網(wǎng)成功后,風(fēng)電機組進入發(fā)電運行狀態(tài),此時葉片捕捉風(fēng)能,并將其轉(zhuǎn)化為電能輸送至電網(wǎng)。
在發(fā)電階段,給定轉(zhuǎn)速逐漸增加到機組額定轉(zhuǎn)速。主控系統(tǒng)根據(jù)實時風(fēng)速和電網(wǎng)需求動態(tài)調(diào)整風(fēng)電機組的功率輸出,保證安全高效運行。
6.停機狀態(tài)
當風(fēng)速超出設(shè)定的最大允許值、電網(wǎng)調(diào)度中心發(fā)出停機指令,控制系統(tǒng)將執(zhí)行停機程序。主控系統(tǒng)發(fā)送指令給變槳系統(tǒng)執(zhí)行收槳動作。
正常停機時當轉(zhuǎn)速下降到脫網(wǎng)轉(zhuǎn)速后,斷開與電網(wǎng)的連接,完成解列操作。風(fēng)電機組完全停止運轉(zhuǎn),進入待機模式等待下一次啟動指令。
7.故障處理
檢測到必須停機的故障后,主控系統(tǒng)根據(jù)故障情況執(zhí)行正常停機或緊急停機策略。
風(fēng)電機組在啟動、加速、并網(wǎng)過程中,檢測到必須停機的故障后,會直接進入停機階段。
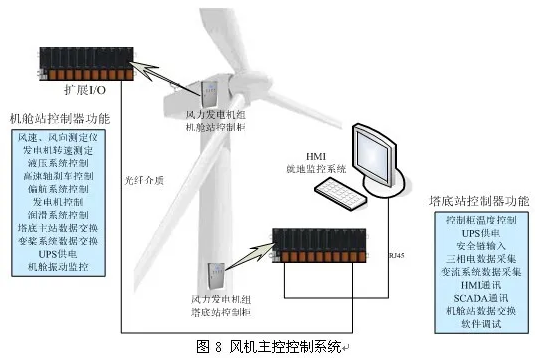
五、風(fēng)電主控系統(tǒng)受控設(shè)備分布
風(fēng)力發(fā)電機的控制系統(tǒng)主要集中在塔底和機艙兩個地方。為了方便后期的維護,主控系統(tǒng)電氣部分主要在塔底,遠程IO從站有一個需要安裝在機艙,塔筒一般有80m左右的高度,為了控制系統(tǒng)的實時性和穩(wěn)定性和抗干擾性,塔底與機艙之間一般采用光纖通訊。
機艙柜受控設(shè)備:偏航系統(tǒng)、發(fā)電機、齒輪箱、測速系統(tǒng)、氣象站、液壓站、制動系統(tǒng)、變槳系統(tǒng)、振動分析儀、UPS電源、其他監(jiān)控數(shù)據(jù)等。
偏航系統(tǒng):偏航系統(tǒng)包括偏航電機、偏航位置傳感器、扭纜開關(guān)等,偏航系統(tǒng)是相對復(fù)雜的部分,要根據(jù)風(fēng)速和風(fēng)向的情況,決定往哪個方向偏航、偏多少度,要控制偏航電機抱閘的開啟關(guān)閉、偏航電機的啟停、偏航液壓剎車的開啟與關(guān)閉,要協(xié)調(diào)好三者的啟停順序和延時。要根據(jù)風(fēng)速功率情況適時實施自動解纜程序。
發(fā)電機:發(fā)電機控制部分包括發(fā)電機的散熱風(fēng)扇和加熱器,根據(jù)發(fā)電機線圈溫度和軸承溫度啟動加熱和散熱程序。
齒輪箱:對齒輪油溫、軸承溫度及壓力進行實時監(jiān)測,并根據(jù)溫度條件自動啟動油循環(huán)系統(tǒng)、散熱風(fēng)扇或加熱器,確保齒輪箱處于良好潤滑狀態(tài),減少機械磨損。
測速系統(tǒng):分別對低速軸和高速軸速度進行精確測量,采用接近開關(guān)、編碼器等設(shè)備獲取準確的速度信號,為整個系統(tǒng)的控制決策提供依據(jù)。
氣象站:氣象站包括風(fēng)速、風(fēng)向、戶外溫度的監(jiān)測,有的控制系統(tǒng)加入了大氣壓力和空氣密度的監(jiān)測,氣象站通常采用機械式風(fēng)速風(fēng)向儀或超聲波風(fēng)速風(fēng)向儀,目前有個別機組采用激光測風(fēng)儀來提高測風(fēng)的準確性。
液壓站:為偏航系統(tǒng)和制動系統(tǒng)提供所需的壓力,通過壓力傳感器或壓力開關(guān)智能控制液壓泵的工作狀態(tài),確保系統(tǒng)壓力始終保持在預(yù)設(shè)范圍內(nèi)。
制動系統(tǒng):液壓制動系統(tǒng)是安裝在齒輪箱高速軸的制動盤和剎車鉗,剎車鉗根據(jù)控制系統(tǒng)的指令來動作,剎車鉗的剎車和釋放信號、剎車片的磨損信號接入機艙IO系統(tǒng)。
變槳系統(tǒng):采用通訊方式與主控制器交互數(shù)據(jù),一般采用Can Open、RS485或Profibus通訊協(xié)議。這里這是描述一下主控與變槳需要交互數(shù)據(jù),不對變槳系統(tǒng)展開描述。
振動分析儀:通常采用通訊方式與主控制器交互數(shù)據(jù),一般采用Modbus TCP 、RS485、Canopen等通訊協(xié)議,振動分析儀監(jiān)測塔筒的振動情況和主機架的振動情況,有的控制系統(tǒng)采用4~20mA等模擬量信號傳輸數(shù)據(jù),有的控制系統(tǒng)還將振動分析儀的故障干接點串入風(fēng)電機組安全鏈。
UPS電源:機艙柜應(yīng)配置UPS電源或從塔底接入UPS電源,在電網(wǎng)故障時,保證風(fēng)電機組安全停機。
其他監(jiān)控數(shù)據(jù):主軸承溫度、機艙溫度及散熱控制、控制柜溫度及加熱散熱控制等監(jiān)控點都會接入機艙遠程IO模塊。
塔底柜:塔底柜受控設(shè)備:變流器、電能表、UPS電源、塔底控制柜安裝觸摸屏等。
變流器:采用通訊方式與主控制器交互數(shù)據(jù),一般采用Can Open或Profibus通訊協(xié)議。
電能表:采用通訊方式與主控制器交互數(shù)據(jù),一般采用Modbus TCP 、RS485、Profibus等通訊協(xié)議,電能表的電流互感器應(yīng)該安裝在風(fēng)電機組與箱式變壓器的總出口處,這樣可以測得風(fēng)機機組的凈發(fā)電功率。
UPS電源:塔底柜應(yīng)配置UPS電源,在電網(wǎng)故障時,保證風(fēng)電機組安全停機,保證主控制器可以記錄相關(guān)的歷史數(shù)據(jù)。UPS電源應(yīng)該通過通訊方式與主控制器交互,上報剩余電量,或者將UPS電源電量低的信號通過硬接線方式上傳控制系統(tǒng)。
塔底控制柜安裝觸摸屏:用于人工交互,控制柜門設(shè)置手動停機、安全鏈停止、急停開關(guān)等按鈕,塔底IO從站檢測環(huán)境溫度、柜內(nèi)溫度、柜內(nèi)電氣元件信號等,部分控制系統(tǒng)將箱式變壓器的信號也接入塔底IO從站。
偏航系統(tǒng):偏航系統(tǒng)包括偏航電機、偏航位置傳感器、扭纜開關(guān)等,偏航系統(tǒng)是相對復(fù)雜的部分,要根據(jù)風(fēng)速和風(fēng)向的情況,決定往哪個方向偏航、偏多少度,要控制偏航電機抱閘的開啟關(guān)閉、偏航電機的啟停、偏航液壓剎車的開啟與關(guān)閉,要協(xié)調(diào)好三者的啟停順序和延時。要根據(jù)風(fēng)速功率情況適時實施自動解纜程序。
發(fā)電機:發(fā)電機控制部分包括發(fā)電機的散熱風(fēng)扇和加熱器,根據(jù)發(fā)電機線圈溫度和軸承溫度啟動加熱和散熱程序。
齒輪箱:對齒輪油溫、軸承溫度及壓力進行實時監(jiān)測,并根據(jù)溫度條件自動啟動油循環(huán)系統(tǒng)、散熱風(fēng)扇或加熱器,確保齒輪箱處于良好潤滑狀態(tài),減少機械磨損。
測速系統(tǒng):分別對低速軸和高速軸速度進行精確測量,采用接近開關(guān)、編碼器等設(shè)備獲取準確的速度信號,為整個系統(tǒng)的控制決策提供依據(jù)。
氣象站:氣象站包括風(fēng)速、風(fēng)向、戶外溫度的監(jiān)測,有的控制系統(tǒng)加入了大氣壓力和空氣密度的監(jiān)測,氣象站通常采用機械式風(fēng)速風(fēng)向儀或超聲波風(fēng)速風(fēng)向儀,目前有個別機組采用激光測風(fēng)儀來提高測風(fēng)的準確性。
液壓站:為偏航系統(tǒng)和制動系統(tǒng)提供所需的壓力,通過壓力傳感器或壓力開關(guān)智能控制液壓泵的工作狀態(tài),確保系統(tǒng)壓力始終保持在預(yù)設(shè)范圍內(nèi)。
制動系統(tǒng):液壓制動系統(tǒng)是安裝在齒輪箱高速軸的制動盤和剎車鉗,剎車鉗根據(jù)控制系統(tǒng)的指令來動作,剎車鉗的剎車和釋放信號、剎車片的磨損信號接入機艙IO系統(tǒng)。
變槳系統(tǒng):采用通訊方式與主控制器交互數(shù)據(jù),一般采用Can Open、RS485或Profibus通訊協(xié)議。這里這是描述一下主控與變槳需要交互數(shù)據(jù),不對變槳系統(tǒng)展開描述。
振動分析儀:通常采用通訊方式與主控制器交互數(shù)據(jù),一般采用Modbus TCP 、RS485、Canopen等通訊協(xié)議,振動分析儀監(jiān)測塔筒的振動情況和主機架的振動情況,有的控制系統(tǒng)采用4~20mA等模擬量信號傳輸數(shù)據(jù),有的控制系統(tǒng)還將振動分析儀的故障干接點串入風(fēng)電機組安全鏈。
UPS電源:機艙柜應(yīng)配置UPS電源或從塔底接入UPS電源,在電網(wǎng)故障時,保證風(fēng)電機組安全停機。
其他監(jiān)控數(shù)據(jù):主軸承溫度、機艙溫度及散熱控制、控制柜溫度及加熱散熱控制等監(jiān)控點都會接入機艙遠程IO模塊。
塔底柜:塔底柜受控設(shè)備:變流器、電能表、UPS電源、塔底控制柜安裝觸摸屏等。
變流器:采用通訊方式與主控制器交互數(shù)據(jù),一般采用Can Open或Profibus通訊協(xié)議。
電能表:采用通訊方式與主控制器交互數(shù)據(jù),一般采用Modbus TCP 、RS485、Profibus等通訊協(xié)議,電能表的電流互感器應(yīng)該安裝在風(fēng)電機組與箱式變壓器的總出口處,這樣可以測得風(fēng)機機組的凈發(fā)電功率。
UPS電源:塔底柜應(yīng)配置UPS電源,在電網(wǎng)故障時,保證風(fēng)電機組安全停機,保證主控制器可以記錄相關(guān)的歷史數(shù)據(jù)。UPS電源應(yīng)該通過通訊方式與主控制器交互,上報剩余電量,或者將UPS電源電量低的信號通過硬接線方式上傳控制系統(tǒng)。
塔底控制柜安裝觸摸屏:用于人工交互,控制柜門設(shè)置手動停機、安全鏈停止、急停開關(guān)等按鈕,塔底IO從站檢測環(huán)境溫度、柜內(nèi)溫度、柜內(nèi)電氣元件信號等,部分控制系統(tǒng)將箱式變壓器的信號也接入塔底IO從站。
六、風(fēng)電主控系統(tǒng)檢查與維護
1、檢查塔架接地電阻
一般風(fēng)力發(fā)電機組的整機接地電阻必須≤4歐姆,必要時還需復(fù)檢。接地電阻影響到整機的安全,如接地電阻過大,會導(dǎo)致整機防雷能力降低,可能會導(dǎo)致雷擊過壓器件損壞。接地不良還會導(dǎo)致電磁干擾,影響機組運行。
2、檢查塔架照明設(shè)備
應(yīng)檢查塔架燈開關(guān)是否可以正常使用,燈是否可以點亮,如照明燈損壞,需要及時更換。檢查塔架燈座固定與塔架燈電纜的固定是否牢固,電線有無破損。如果使用應(yīng)急燈,還需要定期測試其應(yīng)急功能是否正常。
3、檢查塔架內(nèi)敷設(shè)的電纜
需要在定期和日常維護中對塔架內(nèi)的電纜進行檢查,包括主動力電纜、控制信號電纜等。主要檢查電纜絕緣層有無磨損、電纜絕緣層有無燒灼、鼓包、龜裂,以及電纜有無下滑扭曲的現(xiàn)象。
4、檢查塔架電纜夾板
塔架內(nèi)主動力電纜經(jīng)發(fā)電機出線后沿塔架壁至主控和變流柜內(nèi)。在塔架壁上,每隔幾米距離便有電纜夾板固定電纜,能起到固定電纜的作用。主要檢查內(nèi)容包括:電纜夾板有無老化,固定螺栓是否緊固;電纜固定在電纜卡槽內(nèi),無電纜從夾板中滑脫、被擠壓。
5、檢查機組軟件版本號
打開人機交互界面,在控制面板上查看主控系統(tǒng)使用的軟件和程序版本號,與廠家要求軟件和程序版本號進行比對,以確定該機組主控制器軟件和程序是否為最新版本。
6、測試主控柜急停按鈕功能
通過監(jiān)控面板查看主控柜急停按鈕報警指示。當按下急停按鈕后,面板提示急停故障,當旋開急停按鈕后,按下復(fù)位按鈕鍵,可以解除急停故障,表明主控柜急停按鈕的功能正常。
7、主控柜加熱器和散熱器維護檢查
溫度控制器能夠正常控制加熱器的啟動與停止。調(diào)整溫度控制器,查看加熱和散熱器風(fēng)扇開關(guān)是否打開,如風(fēng)扇可以正常運行,表明主控柜內(nèi)加熱和散熱器功能正常。需要每半年清理散熱器通風(fēng)濾網(wǎng)上沉積的灰塵,以保證柜體通風(fēng)散熱良好。
8、主柜UPS蓄電池維護
蓄電池的壽命一般在3年以上,由于現(xiàn)場環(huán)境惡劣,受溫度、濕度等外界環(huán)境影響,會縮短蓄電池的使用壽命。如果維護工作做到位,就可延長蓄電池壽命。
主控柜的電氣檢查和維護還包括以下七項:
(1)主控柜內(nèi)線纜及接線端子維護檢查。
(2)檢查柜門和柜門鎖是否正常,柜體照明燈是否正常。
(3)檢查面板顯示是否正常,查看數(shù)據(jù)有無異常
(4)檢查柜體內(nèi)是否有雜物,并清潔柜體。
(5)檢查各散熱器過濾棉有無污損或破損,并及時清理或更換。
(6)檢查所有繼電器、接觸器、斷路器、端子排接線是否松動。
(7)檢查柜內(nèi)主要零部件接地及柜體接地與接地極的連接是否牢固、可靠。
(2)檢查柜門和柜門鎖是否正常,柜體照明燈是否正常。
(3)檢查面板顯示是否正常,查看數(shù)據(jù)有無異常
(4)檢查柜體內(nèi)是否有雜物,并清潔柜體。
(5)檢查各散熱器過濾棉有無污損或破損,并及時清理或更換。
(6)檢查所有繼電器、接觸器、斷路器、端子排接線是否松動。
(7)檢查柜內(nèi)主要零部件接地及柜體接地與接地極的連接是否牢固、可靠。
七、主控系統(tǒng)在風(fēng)電運維中的重要性
風(fēng)電機組停機分為兩種:正常停機和保護停機。除小風(fēng)停機和人為手動停機外,多數(shù)屬于保護停機。保護停機可分為兩種,一種是無需人為干預(yù),在適當條件下,由主控發(fā)出復(fù)位命令,能自動復(fù)位并網(wǎng)的保護停機。如:塔筒共振、一級振動、高風(fēng)切除和電網(wǎng)故障等;另一種是需人為干預(yù)(故障處理、維修或部件更換等)的保護停機。如:“變槳驅(qū)動器故障”、“充電器故障”以及“齒輪油冷卻風(fēng)扇故障”等等。停機后,及時、迅速地進行機組維修和復(fù)位啟機,有利于提高機組利用率和發(fā)電量。
1、主控系統(tǒng)報故障準確性
當外部不滿足機組運行條件,或機組自身出現(xiàn)故障時,運行機組自動報故障停機。停機故障信息可通過人機界面,主控調(diào)試軟件,或SCADA后臺軟件進行查看。
現(xiàn)場維修人員主要根據(jù)主控所采集的各種信息分析、判斷和排除機組故障。但是,如果主控程序設(shè)計夠不完善,停機邏輯不夠明晰、主控參數(shù)設(shè)置不合理,或主控硬件抗干擾能力弱等都會造成主控報故障不準確,出現(xiàn)誤報故障。不僅會降低利用率和發(fā)電量,增加分析、判斷機組故障的時間,還會造成部件的錯誤更換,增加備件用量等。
2、主控數(shù)據(jù)采集與儲存
機組維修維護時根據(jù)現(xiàn)場運維需要,可通過后臺SCADA軟件或運用主控調(diào)試軟件,隨時提取主控數(shù)據(jù)。例如:在機組定期維護檢查發(fā)電效率是否變化時,可運用主控調(diào)試維修軟件很方便地在機艙上從主控讀取數(shù)據(jù),形成功率曲線,再與這臺機組上一年的歷史功率曲線數(shù)據(jù)進行比較,以檢查機組的葉片對零、風(fēng)向標、風(fēng)速儀及功率曲線控制參數(shù)是否存在問題。
如果以不適當?shù)姆绞皆谥骺卮鎯Γ跈z查故障時,就很難知道機組故障時具體狀況,給機組維修帶來困難。如僅在SCADA后臺軟件中采集和存儲這些信息,在機艙上進行機組維修和維護時,就不能便捷的查到機組信息,無疑給機組維修和維護帶來了困難。還可能因數(shù)據(jù)包的丟失,或通訊中斷,而丟失掉眾多的“瞬間”信息,這無形增加了故障分析的難度。
3、遠程故障診斷與機組容錯運行
通過主控系統(tǒng)的多級權(quán)限管理,在風(fēng)電場的集中監(jiān)控室,或遠程控制中心對機組進行遠程操控,以適當?shù)姆绞綄崿F(xiàn)遠程故障診斷和遠程技術(shù)指導(dǎo);實現(xiàn)“集中監(jiān)控,區(qū)域維修”指揮現(xiàn)場;以容錯運行的方式實現(xiàn)機組遠程故障處理。這些功能和目標的實現(xiàn)均依賴于主控程序和后臺軟件,因此,主控系統(tǒng)在其中起著關(guān)鍵性的作用。
在控制中心通過SCADA后臺軟件對機組主控系統(tǒng)的遠程操控,可實現(xiàn)變槳系統(tǒng)、變頻器和發(fā)電機等重要部件的遠程故障診斷與技術(shù)指導(dǎo)。
在風(fēng)電場的集控室,或遠程控制中心,還可以修改主控參數(shù)與操作變頻器的調(diào)試軟件相結(jié)合,實現(xiàn)對雙饋機組變頻器的疑難故障診斷;進行遠程技術(shù)指導(dǎo),協(xié)助現(xiàn)場人員判斷變頻器故障和發(fā)電機故障等。
八、風(fēng)電主控系統(tǒng)市場
1、行業(yè)特點:
技術(shù)含量高:風(fēng)電主控系統(tǒng)涉及控制理論、通信技術(shù)、電力電子技術(shù)等多個領(lǐng)域,技術(shù)含量高,對產(chǎn)品的研發(fā)和生產(chǎn)提出了較高要求。
定制化需求強:由于不同風(fēng)電場的風(fēng)資源條件、機組型號、并網(wǎng)要求等存在差異,風(fēng)電主控系統(tǒng)需要具備高度的定制化能力,以滿足不同項目的實際需求。
可靠性要求高:風(fēng)電主控系統(tǒng)直接關(guān)系到風(fēng)力發(fā)電機組的運行安全和發(fā)電效率,因此對其可靠性要求極高。
定制化需求強:由于不同風(fēng)電場的風(fēng)資源條件、機組型號、并網(wǎng)要求等存在差異,風(fēng)電主控系統(tǒng)需要具備高度的定制化能力,以滿足不同項目的實際需求。
可靠性要求高:風(fēng)電主控系統(tǒng)直接關(guān)系到風(fēng)力發(fā)電機組的運行安全和發(fā)電效率,因此對其可靠性要求極高。
2、行業(yè)現(xiàn)狀:
近年來,中國風(fēng)電主控系統(tǒng)市場呈現(xiàn)出快速發(fā)展的態(tài)勢。一方面,國內(nèi)風(fēng)電裝機容量的持續(xù)增長為風(fēng)電主控系統(tǒng)市場提供了廣闊的市場空間;另一方面,隨著風(fēng)電技術(shù)的不斷進步和市場競爭的加劇,風(fēng)電主控系統(tǒng)的技術(shù)水平不斷提高,產(chǎn)品性能不斷提升。
但同時,中國風(fēng)電主控系統(tǒng)市場也面臨著一些挑戰(zhàn)。一方面,隨著風(fēng)電裝機容量的快速增長,風(fēng)電主控系統(tǒng)的市場競爭日益激烈,企業(yè)需要不斷提高產(chǎn)品質(zhì)量和技術(shù)水平,以應(yīng)對市場競爭的壓力;另一方面,隨著風(fēng)電技術(shù)的不斷發(fā)展和應(yīng)用環(huán)境的不斷變化,風(fēng)電主控系統(tǒng)需要不斷適應(yīng)新的技術(shù)要求和市場需求,進行技術(shù)升級和產(chǎn)品迭代。
3、從市場趨勢來看,未來中國風(fēng)電主控系統(tǒng)市場將呈現(xiàn)以下幾個特點:
一是市場規(guī)模將持續(xù)擴大,隨著國內(nèi)風(fēng)電裝機容量的不斷增長和風(fēng)電技術(shù)的不斷進步,風(fēng)電主控系統(tǒng)市場規(guī)模將繼續(xù)保持增長趨勢;
二是技術(shù)水平將不斷提高,隨著市場競爭的加劇和技術(shù)的進步,風(fēng)電主控系統(tǒng)的技術(shù)水平將不斷提高,產(chǎn)品性能將不斷提升;
三是定制化需求將逐漸增強,隨著風(fēng)電項目的多樣化和個性化需求的增加,風(fēng)電主控系統(tǒng)的定制化需求將逐漸增強;
四是市場競爭將更加激烈,隨著市場規(guī)模的擴大和技術(shù)的進步,風(fēng)電主控系統(tǒng)的市場競爭將更加激烈,企業(yè)需要不斷提高產(chǎn)品質(zhì)量和技術(shù)水平以應(yīng)對市場競爭的壓力。
二是技術(shù)水平將不斷提高,隨著市場競爭的加劇和技術(shù)的進步,風(fēng)電主控系統(tǒng)的技術(shù)水平將不斷提高,產(chǎn)品性能將不斷提升;
三是定制化需求將逐漸增強,隨著風(fēng)電項目的多樣化和個性化需求的增加,風(fēng)電主控系統(tǒng)的定制化需求將逐漸增強;
四是市場競爭將更加激烈,隨著市場規(guī)模的擴大和技術(shù)的進步,風(fēng)電主控系統(tǒng)的市場競爭將更加激烈,企業(yè)需要不斷提高產(chǎn)品質(zhì)量和技術(shù)水平以應(yīng)對市場競爭的壓力。